 中文
中文 English
English360-degree head-up display view could warn drivers of road obstacles in real time
研究人员开发了一种增强现实型抬头显示器,可将潜在危险以高清三维全息图的形式直接实时显示在驾驶员视野中,从而提高道路安全。
Researchers have developed an augmented reality head-up display that could improve road safety by displaying potential hazards as high-resolution three-dimensional holograms directly in a driver’s field of vision in real time.
目前的抬头显示系统只能将二维图像投射到汽车挡风玻璃上,但来自剑桥大学、牛津大学和伦敦大学学院(UCL)的研究人员利用三维激光扫描仪和激光雷达数据开发出一种系统,能以全三维形式显示伦敦街道。
Current head-up display systems are limited to two-dimensional projections onto the windscreen of a vehicle, but researchers from the Universities of Cambridge, Oxford and University College London (UCL) developed a system using a 3D laser scanner and LiDAR data to create a fully 3D representation of London streets.
他们开发的系统可以有效地“透视”物体,投射出隐藏在驾驶员视野之外的道路障碍物的全息影像,投影大小和距离与实物一致。例如,被大卡车挡住的路标将以三维全息图的形式显现,这样驾驶员就能准确知道路标位置及路标信息。
The system they developed can effectively ‘see through’ objects to project holographic representations of road obstacles that are hidden from the driver’s field of view, aligned with the real object in size and distance. For example, a road sign blocked from view by a large truck would appear as a 3D hologram so that the driver knows exactly where the sign is and what information it displays.
3D全息投影技术使驾驶员的注意力始终集中在道路上而非挡风玻璃上,并能够实时投影出各个角度的道路障碍物和潜在危险,来提高道路安全。该研究成果发表于《先进光学材料》杂志。
The 3D holographic projection technology keeps the driver’s focus on the road instead of the windscreen, and could improve road safety by projecting road obstacles and potential hazards in real time from any angle. The results are reported in the journal Advanced Optical Materials.
每年,交通事故夺走135万人的生命,造成多达5000万人受伤。技术手段可以降低这些数字,改善道路安全,方法之一就是通过向驾驶员提供关于潜在危险的信息。目前,主要是通过抬头显示器实现的,它能够提供当前速度或行驶路线等信息。
Traffic accidents claim 1.35 million lives and cause up to 50 million injuries each year. Technology could be used to reduce these numbers and improve road safety, in part by providing information to drivers about potential hazards. Currently, this is mostly done using head-up displays, which can provide information such as current speed or driving directions.
Jana Skirnewskaja(该研究的第一作者、来自剑桥大学工程系)表示:“抬头显示器背后的理念是让驾驶员视线向前,因为哪怕零点几秒不看路面,也足以发生撞车。然而,由于这些是投射到挡风玻璃一小块区域上的二维图像,驾驶员可以看图像,而不是前方的道路。”
“The idea behind a head-up display is that it keeps the driver’s eyes up, because even a fraction of a second not looking at the road is enough time for a crash to happen,” said Jana Skirnewskaja from Cambridge’s Department of Engineering, the study’s first author. “However, because these are two-dimensional images, projected onto a small area of the windscreen, the driver can be looking at the image, and not at the road ahead of them.”
几年来,Skirnewskaja和她的同事们一直致力于研发抬头显示器(HUDs)的替代品,向驾驶员提供更精确的信息,同时让他们的视线始终聚焦在道路上,从而提高道路安全。
For several years, Skirnewskaja and her colleagues have been working to develop alternatives to head-up displays (HUDs) that could improve road safety by providing more accurate information to drivers while keeping their eyes on the road.
“我们希望在驾驶员视野中的任何位置投射道路信息,但不会以一种压倒性或分散注意力的方式,”Skirnewskaja说道。“我们不希望提供任何与当前驾驶任务没有直接关系的信息。”
“We want to project information anywhere in the driver’s field of view, but in a way that isn’t overwhelming or distracting,” said Skirnewskaja. “We don’t want to provide any information that isn’t directly related to the driving task at hand.”
该团队研发了一种增强现实(AR)全息点云视频投影系统,用于在驾驶员视野内投射与现实中物体大小和距离一致的物体。该系统将三维全息装置的数据与激光雷达(光探测和测距)数据相结合。激光雷达使用脉冲光源照射物体,然后测量反射的光脉冲,计算出物体与光源的距离。
The team developed an augmented reality holographic point cloud video projection system to display objects aligned with real-life objects in size and distance within the driver’s field of view. The system combines data from a 3D holographic setup with LiDAR (light detection and ranging) data. LiDAR uses a pulsed light source to illuminate an object and the reflected light pulses are then measured to calculate how far the object is from the light source.
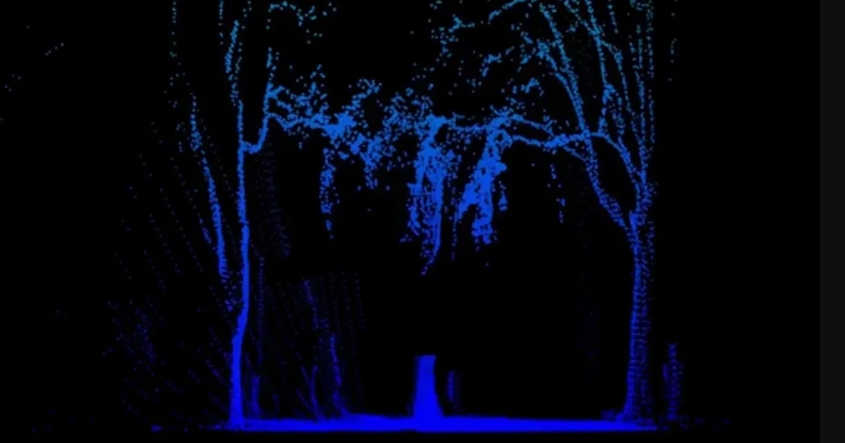
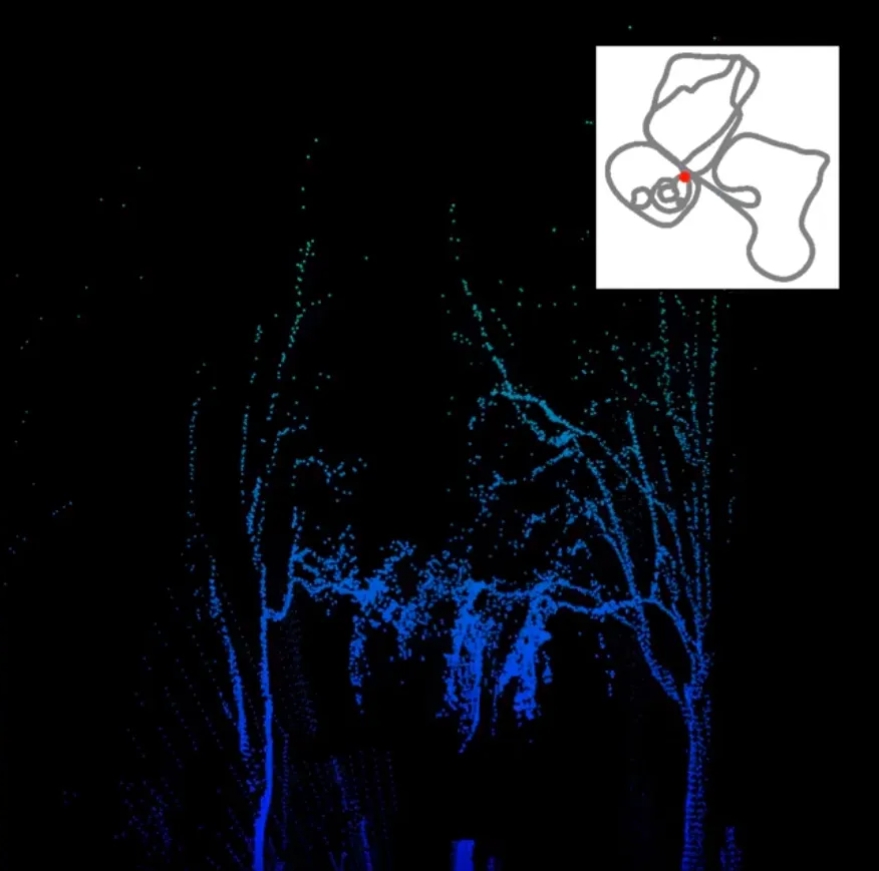
研究人员通过扫描伦敦市中心伦敦大学学院校园内的马莱特街来测试该系统。激光雷达点云的信息被转换为多达40万个数据点组成的分层三维全息图。为驾驶员投射360度障碍物评估的概念源于细致的数据处理,确保每个物体的深度清晰可见。
The researchers tested the system by scanning Malet Street on the UCL campus in central London. Information from the LiDAR point cloud was transformed into layered 3D holograms, consisting of as many as 400,000 data points. The concept of projecting a 360° obstacle assessment for drivers stemmed from meticulous data processing, ensuring clear visibility of each object’s depth.
研究人员加快了扫描过程,以便实时生成和投影全息图像。重要的是,扫描结果可以提供动态信息,因为繁忙的街道每时每刻都在发生变化。
The researchers sped up the scanning process so that the holograms were generated and projected in real time. Importantly, the scans can provide dynamic information, since busy streets change from one moment to the next.
Skirnewskaja指出:“我们收集的数据可以共享并存储在云端,因此任何路过的司机都可以访问这些数据——就像我们日常使用的提供实时交通信息的导航APP的一个更复杂的版本。这样一来,当危险或障碍物在街道上或街道外移动时,系统就能动态地适应不断变化的条件。”
“The data we collected can be shared and stored in the cloud, so that any drivers passing by would have access to it – it’s like a more sophisticated version of the navigation apps we use every day to provide real-time traffic information,” said Skirnewskaja. “This way, the system is dynamic and can adapt to changing conditions, as hazards or obstacles move on or off the street.”
研究人员表示,尽管从不同地点收集更多数据可以提高准确性,但他们研究的独特贡献在于:通过从特定物体(如卡车或建筑物)的单次扫描中选择数据点来实现360度视图,以此对道路危险进行全面评估。
While more data collection from diverse locations enhances accuracy, the researchers say the unique contribution of their study lies in enabling a 360° view by choosing data points from single scans of specific objects, such as trucks or buildings, enabling a comprehensive assessment of road hazards.
“我们可以对于单个物体扫描多达40万个数据点,但这样会产生庞大的数据量,使得实时扫描、提取和投影该对象的数据更具挑战性,”Skirnewskaja说道。“只需100个数据点,我们就可以知道该物体是什么,有多大。我们需要获得足够多的信息,让驾驶员知道周围的情况。”
“We can scan up to 400,000 data points for a single object, but that is quite data-heavy and makes it more challenging to scan, extract and project data about that object in real time,” said Skirnewskaja. “With as little as 100 data points, we can know what the object is and how big it is. We need to get just enough information so that the driver knows what’s around them.”
今年初,Skirnewskaja和她的同事在伦敦科学博物馆进行了一次虚拟演示,虚拟现实头戴式设备装载了该系统的激光雷达数据。用户的反馈帮助研究人员改进了系统,使设计更具包容性和用户友好。例如,他们对系统进行了微调以减少眼部疲劳,并考虑到视觉障碍。
Earlier this year, Skirnewskaja and her colleagues conducted a virtual demonstration with virtual reality headsets loaded with the LiDAR data of the system at the Science Museum in London. User feedback from the sessions helped the researchers improve the system to make the design more inclusive and user-friendly. For example, they have fine-tuned the system to reduce eye strain, and have accounted for visual impairments.
Skirnewskaja表示:“我们希望这个系统易使用且具有包容性,使终端用户感到满意。如果系统会让人分心,那么它就不起作用。我们希望该系统对驾驶员有用,并提高所有道路使用者(包括行人和骑自行车者)的安全。”
“We want a system that is accessible and inclusive so that end users are comfortable with it,” said Skirnewskaja. “If the system is a distraction, then it doesn’t work. We want something useful to drivers, and improves safety for all road users, including pedestrians and cyclists.”
研究人员目前正在与谷歌合作开发这项技术,以便在真实汽车中进行测试。他们希望在2024年进行道路测试,测试地点可以是公共道路或私人道路。
The researchers are currently collaborating with Google to develop the technology so that it can be tested in real cars. They are hoping to carry out road tests, either on public or private roads, in 2024.
该研究得到了英国工程和自然科学研究委员会(属于英国国家科研与创新署)和德国商业基金会的部分资助。
The research was supported in part by the Engineering and Physical Sciences Research Council (EPSRC), part of UK Research and Innovation (UKRI), and Stiftung der Deutschen Wirtschaft.


Center station B account

Center WeChat public account
All rights reserved © Cambridge University Nanjing Centre of Technology and Innovation Design In By:SeniorWeb