

单材料电子皮肤赋予机器人人类触感
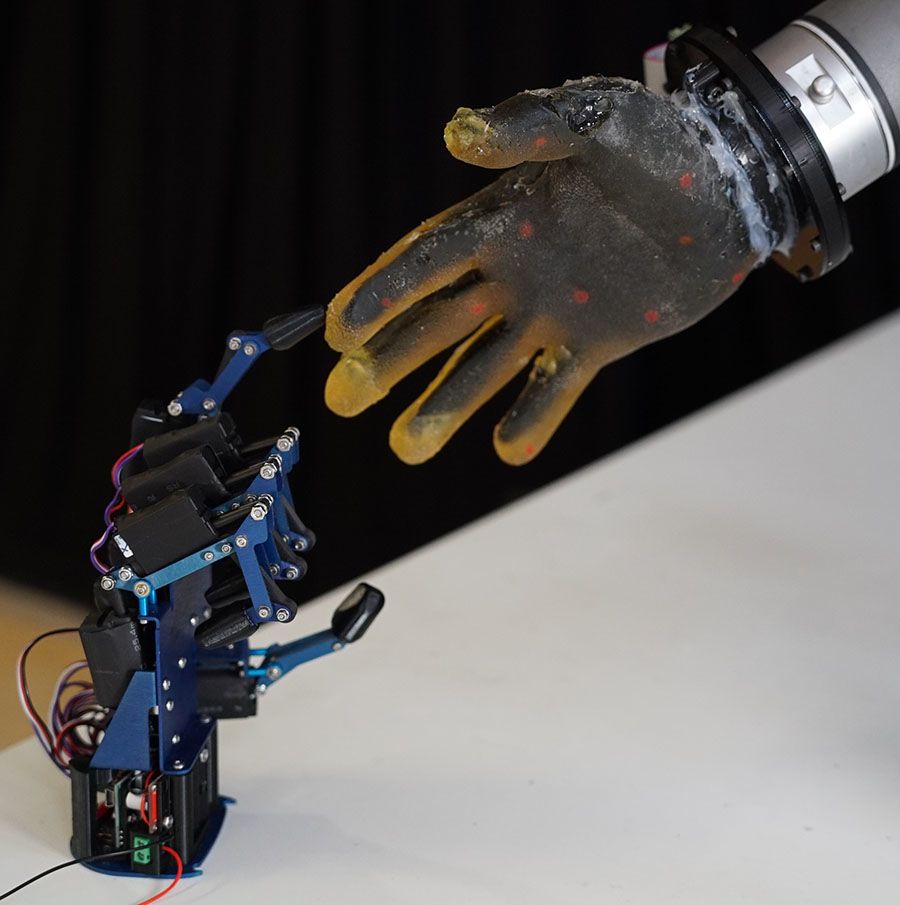
科学家们开发了一种低成本、耐用、高灵敏度的机器人"皮肤",它可以像手套一样安装在机械手上,使机器人能够以类似于人类的方式感知周围环境的信息。
来自剑桥大学和伦敦大学学院(UCL)的研究人员开发了这种柔性导电皮肤,它制造简单、可熔化且可塑性强。该技术能感知和处理一系列物理输入信号,使机器人能够以更有意义的方式与物理世界交互。
通常机器人触觉解决方案是通过嵌入小区域的传感器工作,并需要不同传感器检测不同类型的触觉,而剑桥大学和伦敦大学学院研究人员开发的电子皮肤则不同,其整体就是一个传感器,这使其更接近人类自身的传感系统,也就是我们的皮肤。
尽管这种机器人皮肤的灵敏度不如人类皮肤,但它能检测到材料中超过86万个微小通路的信号,使其能够识别在单一材料中不同类型的触觉和压力——例如指尖轻敲、冷热表面、切割或刺伤造成的损伤,或同时多点触碰。
研究人员结合物理测试和机器学习技术,帮助电子皮肤"学习"哪些通路最重要,从而更高效地感知不同类型的接触。
研究人员表示,除了未来可能应用于需要触觉的人形机器人或人类假肢外,这种电子皮肤还可用于汽车行业或灾害救援等广泛领域。研究结果发表在《科学·机器人学》期刊上。
电子皮肤的工作原理是将物理信息(如压力或温度)转换为电信号。在大多数情况下,不同类型的触觉需要不同类型的传感器(一种用于检测压力,另一种用于检测温度,以此类推)。这些传感器随后被嵌入柔软的柔性材料中。然而,不同传感器的信号可能会相互干扰,且材料容易损坏。
来自剑桥大学工程系的首席作者大卫·哈德曼(David Hardman)博士说:"不同类型的触觉使用不同传感器,会导致材料的制造变得复杂。我们希望开发一种能在单一材料中同时检测出多种类型触觉的解决方案。"
"同时,我们需要成本低廉且耐用的材料,以便广泛推广,"来自伦敦大学学院的共同作者托马斯·乔治·特鲁特尔(Thomas George Thuruthel)博士补充道。
他们的解决方案采用了一种对不同触觉类型反应不同的单一传感器,即多模态感知。虽然分离每种信号的成因具有挑战性,但多模态感知材料更易制造且具有更好的稳健性。
研究人员将一种柔软、有弹性且导电的明胶基水凝胶熔化,并铸造成人手的形状。他们测试了多种不同的电极配置,以确定哪种配置能提供最有用的触觉信息。仅通过手腕处的32个电极,他们就能从整只手上收集超过170万条信息,这得益于导电材料中的微小通路。
随后,研究人员用不同类型的触觉测试了这种皮肤:用热风枪喷射、手指和机械臂按压、手指轻触,甚至用手术刀切开。团队利用这些测试中收集到的数据来训练一个机器学习模型,使机械手能够识别不同触觉信号所代表的含义。
共同作者饭田史也氏(Fumiya Iida)教授实验室的博士后研究员哈德曼表示:"我们能从这些材料中获取大量信息——它们能非常快速地进行数千次测量。它们能在很大的表面积上同时测量许多不同参数。"
特鲁特尔表示:"我们的电子皮肤尚未达到人类皮肤的灵敏度水平,但我们认为它目前优于其他所有同类产品。我们的方法比传统传感器更灵活易用,还能通过人类触觉校准以适应多种任务。"
未来,研究人员希望提高电子皮肤的耐用性,并在实际机器人任务中进行进一步测试。
该研究由三星全球研究拓展计划、英国皇家学会以及英国工程与物理科学研究理事会(EPSRC,隶属于英国研究与创新署UKRI)资助。饭田史也氏(Fumiya Iida)是剑桥大学基督圣体学院教员。
--作者:萨拉·柯林斯


